華耐機器人源頭廠家
提供工業機器人自動化系統解決方案

業務咨詢:
華耐機器人源頭廠家
業務咨詢:



發布時間:2025-08-15來源:焊接機器人廠家閱讀數:30
在工業自動化的宏大版圖中,伺服電機猶如一位精準的 “舞者”,憑借其卓越的高精度和快速響應能力,在自動化設備、機器人、數控機床等眾多領域大放異彩。而決定這顆 “明星” 能否在不同場景中完美 “起舞” 的關鍵,正是其多樣的控制模式。接下來,讓我們一同深入探索伺服電機常用的幾種控制模式,揭開它們精準驅動的奧秘。
轉矩控制模式:穩控力量的 “大力士”
轉矩控制模式的核心目標,是讓電機軸穩定輸出預設的轉矩。就像起重機在吊運重物時,必須精準控制電機輸出的力量,才能避免重物晃動甚至墜落的危險。在這種模式下,控制器會實時對比預先設定的轉矩指令和電機實際產生的轉矩,計算出兩者之間的偏差,然后通過調整電機的運行狀態來消除這個偏差,確保轉矩輸出始終穩定。
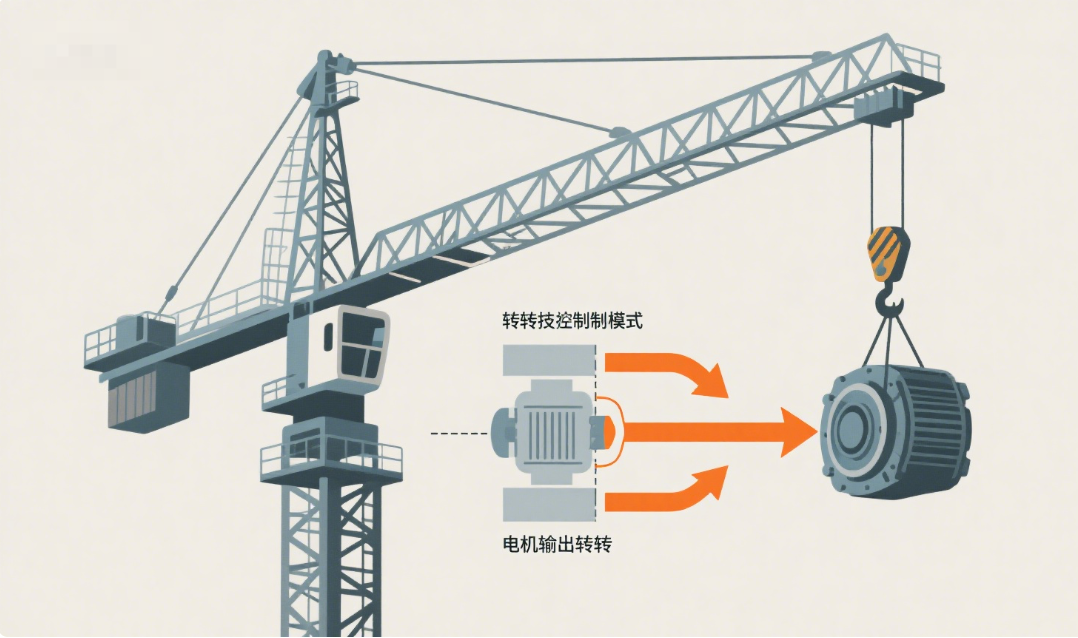
其背后的核心支撐是轉矩閉環控制系統,這個系統由轉矩傳感器、控制器、驅動器和電機共同構成。轉矩傳感器如同敏銳的 “感知器”,實時檢測電機軸的實際轉矩,并將其轉化為電信號傳遞給控制器。為了實現對轉矩的精確把控,該模式常采用 PID 控制算法或模糊控制算法。正因如此,轉矩控制模式廣泛應用于起重機、壓力機、攪拌機等對轉矩輸出要求極高的設備中,為這些設備的穩定運行提供了可靠保障。
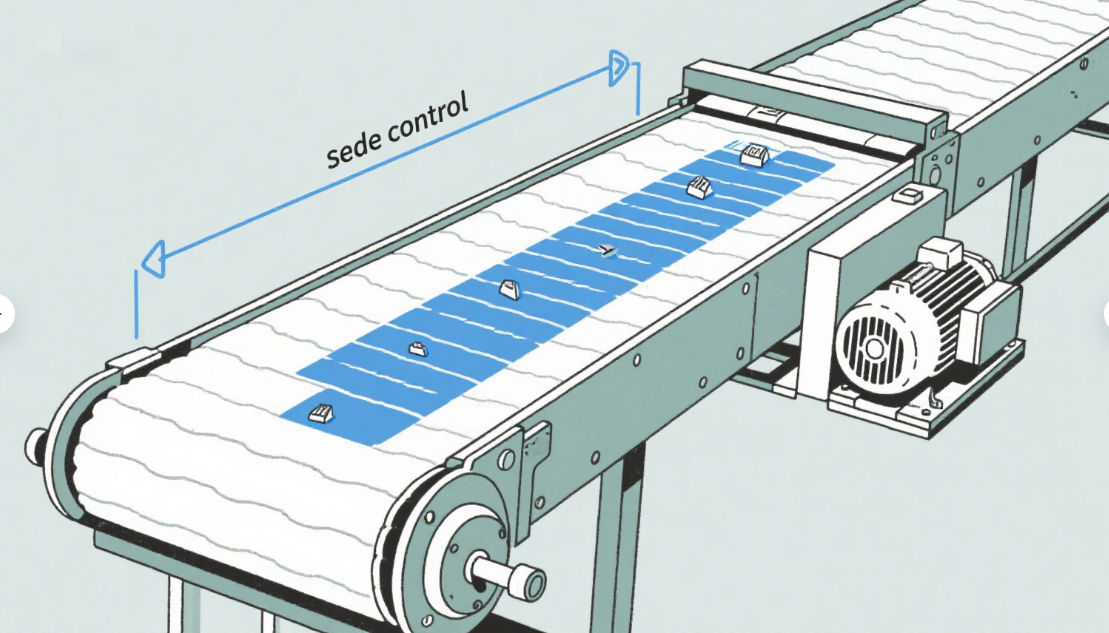
速度控制模式:恒定運轉的 “節奏大師”
速度控制模式的目標明確,就是讓電機軸以恒定速度或按預設規律變化的速度運轉。以輸送帶為例,要保證物料能夠平穩地從一端輸送到另一端,就需要電機軸保持恒定的轉速。此時,控制器會根據給定的速度指令和電機實際運行的速度進行對比,算出速度偏差后,通過驅動器對電機的運行進行調控,直到電機轉速達到預定速度。
速度閉環控制系統是速度控制模式的核心,它由速度傳感器、控制器、驅動器和電機組成。速度傳感器就像精準的 “測速儀”,時刻檢測電機軸的實際速度,并將其轉換為電信號傳送給控制器。和轉矩控制模式類似,速度控制模式通常也采用 PID 控制算法,通過精確調整比例、積分、微分這三個系數,實現對電機速度的精準控制。這種模式在輸送帶、風機、泵等需要恒定或按規律變化速度的場景中得到了廣泛應用。
位置控制模式:精準定位的 “導航專家”
位置控制模式致力于讓電機軸精確地抵達預設位置。在數控機床加工零件時,電機軸必須按照預定的軌跡精確移動,才能保證零件的加工精度。在該模式下,控制器會依據給定的位置指令和電機軸的實際位置,計算出位置偏差,進而調整電機的運行狀態來消除偏差,確保電機軸準確到達目標位置。
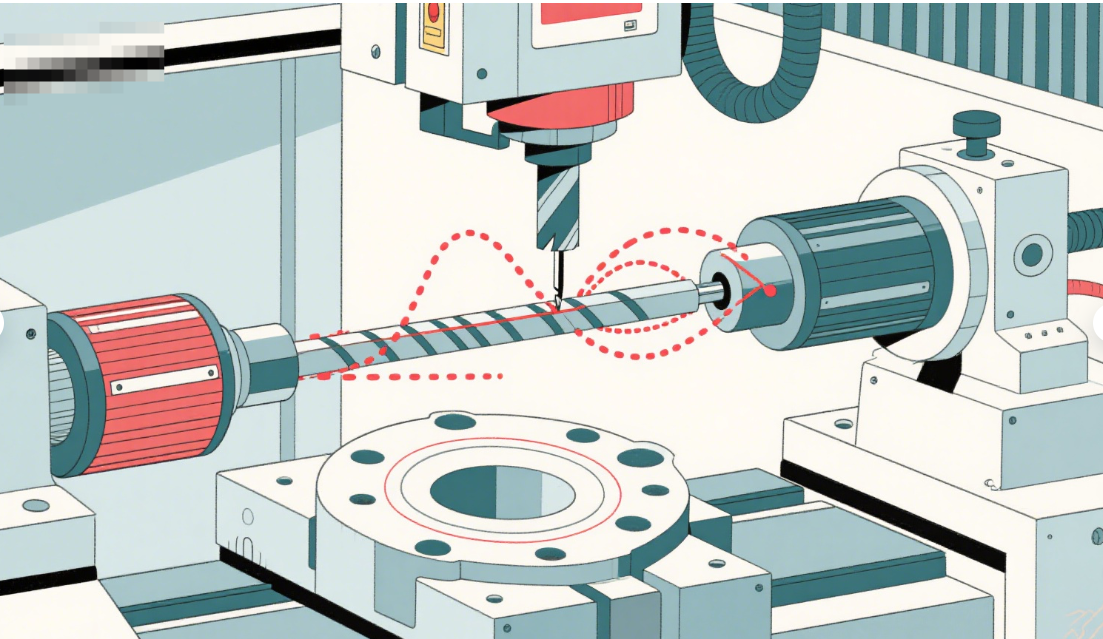
位置閉環控制系統由位置傳感器、控制器、驅動器和電機構成。位置傳感器如同精準的 “定位儀”,實時檢測電機軸的實際位置,并將其轉換為電信號傳遞給控制器。位置控制模式同樣常采用 PID 控制算法,通過合理調整比例、積分、微分系數,實現對電機位置的精確控制。它在數控機床、機器人關節、自動化裝配線等對位置精度要求極高的場合中發揮著重要作用。
全閉環控制模式:極致精度的 “升級方案”
全閉環控制模式是相對于半閉環控制的 “進階版本”,專為追求極致精度而生。在半閉環控制中,數控系統或 PLC 發出速度脈沖指令后,伺服電機執行指令,過程中伺服電機自身的編碼器會將位置信息反饋給伺服系統進行偏差修正,但這種方式無法避免機械誤差,因為控制系統并不知道電機軸的實際位置。
而在全閉環控制模式下,伺服電機接收上位控制器發出的速度可控脈沖指令并執行,同時機械裝置上的位置反饋裝置會直接將實際位置信息反饋給控制系統。控制系統對比指令位置和實際位置后判斷偏差,再向伺服電機發出修正指令,從而實現更精準的控制。這種將伺服電機、運動控制器、位置傳感器有機結合的控制模式,能達到極高的精度,常用于對精度要求極高的高端制造設備中。
伺服電機的這幾種控制模式各具特色,分別適用于不同的應用場景。在實際應用中,只有根據設備的具體需求和性能要求,精心選擇合適的控制模式,才能充分發揮伺服電機的優勢,提升整個自動化系統的穩定性、精度和性能。你在日常工作中使用過哪種控制模式呢?歡迎分享你的使用經驗。
上一篇: 焊接機器人的使用場景有哪些要求和原則
下一篇: 行業新聞